Close 
Choose your language

Video tutorials
Here you can find step-by-step programming examples and tutorials for troubleshooting and repair tasks.
If you want to learn the essentials of programming a UR robot, check out the Free e-Learning section where you can find interactive e-learning for both e-Series and CB3 robots.
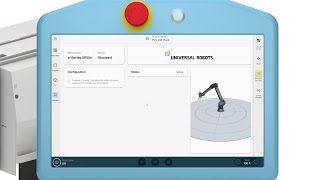
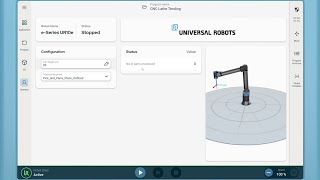
1 Introduction to the GUI of PolyScope X
In this module, you will see the brand new GUI of PolyScope X and where to find what.
The next modul…
 2m 35s
2m 35s

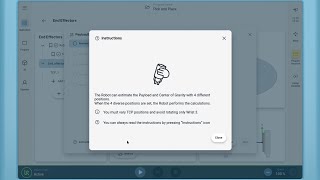
2 Configuration of a Tool using the wizard
See how to use the wizards to configure Payload, Center of Gravity (CoG), Tool Center Point (TCP) an…
3m 28s

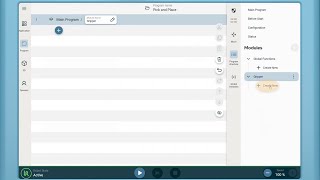
3 How to make a simple Pick and Place Program
In this video we show how to make a simple Pick and Place program using PolyScope X.
3m 27s
4 Using Modules and functions to increase readability and reusability of your program
Learn how to make Modules and functions. This will increase the readability of your program, and mak…
2m 49s
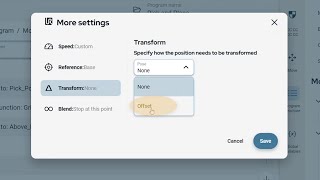
5 Transform positions with Offsets to minimize the number of waypoints
Learn how to Transform a waypoint using a user-defined offset. This will minimize the number of wayp…
2m 18s

6 Make a Grid in your application
Learn how to use the Grid feature in PolyScope X, to minimize the number of waypoints needed. (It re…
2m 27s
7 A Simple CNC application using Grid, modules and functions, and Transforms
In this module the features: Modules and Functions, Grids, and Transform with offsets are used to bu…
3m 21s
8 Features of the Operator screen
Learn how to set up the operator screen. How to make input variable and selections accessible to the…
3m 45s

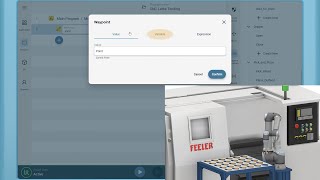
9 Short walkthrough of the CNC Lathe machine template
See a short walkthrough of the template for a CNC Lathe Machine application. Teach the key waypoints…
1m 26s
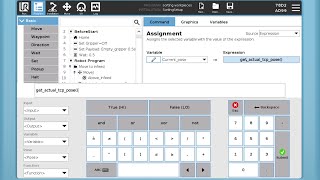
1 Introduction to URScript
Get an introduction to where you have already used URScript. Where to find most common functions, an…
7m 46s

2 System execution architecture
Overview of the System execution architecture of URScript, to give an explanation of "what goes wher…
8m 54s
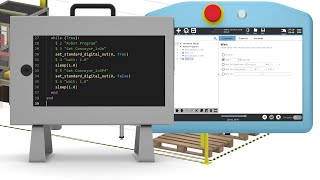
3 Node to URScript conversion
Simple walkthrough of how a program can be converted into URScript. This gives a basic understanding…
3m 33s
4 Dashboard Server
Learn how to use a TCP/IP Socket connection https://docs.universal-robots.com/tutorials/urscrip…
4m 09s
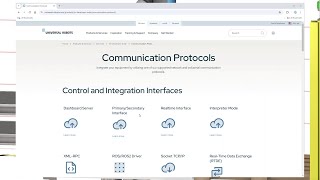
5 Interfaces and remote URScript
Get an overview of the different communication interfaces https://www.universal-robots.com/prod…
7m 15s

1 Unboxing
2m 10s

2 Hardware Installation
3m 16s

3 Software Setup
0m 41s

4 Calibration
1m 36s
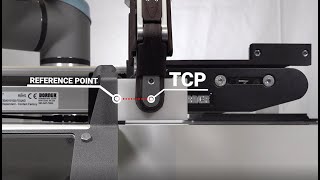
Tool Configuration: TCP, orientation, payload & center of gravity
This tutorial walks you through all the steps of configuring a tool/end-effector
4m 33s

Learn to do machine tending with Universal Robots
Try our new machine tending module in the “e-Series Application Track” in “Online Training”. Here yo…
3m 05s

Improve and speed up your programming with constrained freedrive
From version 5.8 of Polyscope, it’s now possible to constrain rotation or movement in linear axes wh…
2m 40s

Prevent collision after program stop with a "Before Start Sequence"
Have you ever experienced your robot colliding with its surroundings when restarting it after a prog…
4m 59s
Measure object dimensions using only a gripper
Learn how you can program the robot to measure the dimensions of objects using only a gripper and a…
5m 57s
How to use the force sensor to detect objects
How to use the force sensor to detect objects (direction command/move until tool contact)
3m 54s
How to align the active TCP to a feature
In this video tutorial you will learn how to align the active TCP to a feature.
1m 44s
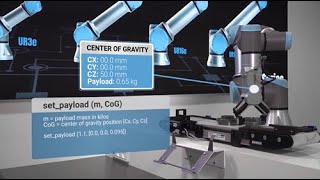
CB3: How to change payload and center of gravity during program execution
In this video tutorial you will learn how to change payload and center of gravity during program exe…
2m 42s

Safety: restricting tool direction angle
Learn how to make your application safer by restricting the angle in which the end-of-arm tool is al…
3m 44s

Safety: setting joint limits & speed
Learn how to restrict the movement range & speed for each individual robot joint
2m 47s

Safety: create and configure safety planes
Learn how to create and configure safety planes. The planes can prevent the robot from moving beyond…
2m 00s